평면 운동은 2차원을 가정합니다. z축이 없다고 생각하시면 됩니다.
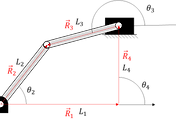
아래와 같이 평면에 bar가 세개 놓여 있다고 합시다. 링크의 개수는 몇개인가요?

링크의 개수는 네개입니다. 바닥(ground)도 하나의 링크입니다. 바닥이 링크라는 개념을 이해하기 위해, 바닥에 링크 하나가 올려진 경우를 생각해봅시다. 이 링크는 바닥 위에서 3자유도로 자유롭게 움직일 수 있습니다. 이러한 움직임을 바닥과 링크 사이의 조인트(joint)에서 일어나는 음직임으로 이해할 수 있습니다. 바닥과 링크 사이에 3자유도인 조인트가 있는 것입니다. 따라서 바닥도 링크로 고려해야 합니다.
다시 원래 예제로 돌아갑시다. 바닥에 bar 세개가 놓여 있습니다. 링크의 개수는 4개입니다.
링크를 아래와 같이 연결했다고 합시다.
자유도를 구해봅시다. 아래와 같은 단계를 거칩니다.
Step1) 모든 링크의 구속이 풀어져 있다고 가정하고 자유도를 구함
모든 링크의 구속이 풀어져 있다고 가정합시다. 바닥링크는 움직이지 않으므로, 움직일 수 있는 링크는 (4-1)개입니다. 3개의 링크가 자유롭게 움직일 수 있고, 각각 3자유도를 가지므로 총 9자유도입니다.
DOF=(4−1)×3=9
Step2) 조인트를 하나씩 구속하며 자유도를 제거함
첫번째 조인트(a) 를 구속하면 링크 1의 자유도가 2개 줄어듭니다. 두번째 조인트(b)를 구속하면 링크 2의 자유도가 2개 줄어듭니다. 세번째 조인트(c)를 구속하면 링크 3의 자유도가 2개 줄어듭니다. 현재 세번째 링크 끝단의 자유도는 3입니다. 끝단 자유도는 기구의 자유도입니다. 세번째 조인트 끝단이 바닥과 고정되면 2자유도가 사라집니다. 따라서 끝단 자유도는 1이 됩니다.
지금까지의 내용을 수식으로 표현하면 아래와 같습니다.
DOF=(4−1)×3−2×4=1
일반화시켜봅시다. N개의 링크기구에서, 자유도 1인 조인트가 P1개, 자유도 2인 조인트가 P2개 있으면 기구의 자유도는 아래와 같이 계산됩니다.
DOF=(N−1)×3−P1×2−P2×1
위 식을 그뤼블러-쿠츠바흐 방정식이라고 부릅니다.
'기계공학 기타과목 > 기구학' 카테고리의 다른 글
| [기구학] 한 끝이 고정된 링크의 속도벡터 구하기 (0) | 2022.06.30 |
|---|---|
| [기구학] 4절 크랭크-슬라이더 위치해석 (position analysis) (2) 파이썬으로 위치계산기 만들기 (0) | 2022.06.28 |
| [기구학] 4절 크랭크-슬라이더 위치해석 (position analysis) (1) 공식 유도 (0) | 2022.06.27 |
| [기구학] 4절 링크 위치해석 (position analysis) (2) 파이썬으로 위치계산기 만들기 (0) | 2022.06.27 |
| [기구학] 4절 링크 위치해석 (position analysis) (1) 공식 유도 (0) | 2022.06.23 |

댓글