힘을 받는 물체가 평형을 이루고 있다고 합시다. 이 물체의 단면을 자르면 단면에는 힘이 작용하고 있습니다. 단면에서 작은 요소 하나를 잡겠습니다. 넒이가 A인 요소입니다. 이 요소에도 힘이 작용하고 있습니다. 힘의 합력은 특정 방향으로 작용하고 있을텐데, 그 방향이 어떻든 간에 normal 방향과 shear 방향의 두 힘 성분으로 나타낼 수 있습니다. 만약 수직방향을 x축으로 하여 좌표계를 하나 잡는다고 하면, normal 방향 힘 하나와 shear 방향 힘 두개로 분해할 수 있습니다. (그림출처 Advanced Mechanics of Materials and Applied Elasticity)

이때 단면의 면적 A를 0으로 보내면 각 힘도 0이 됩니다. 그렇다면 A가 0으로 갈 때, ForceArea 은 어떻게 될까요? 어떤 극한값으로 수렴합니다. 이 수렴값이 stress 입니다. 증명이 가능한지는 저도 모르겠습니다.
σx=limΔA→0ΔFxΔA
이 개념을 확장하면 아래와 같은 3차원 응력요소를 생각할 수 있습니다. (그림출처 Advanced Mechanics of Materials and Applied Elasticity)
아이러니하게도 이 요소는 점입니다. 점을 확대해 놓은 것이라 생각하면 되는데, 사실 말이 안되는 소리입니다. 점은 넓이도 부피도 없기 때문입니다. 그런데 극한값이므로 점에는 위와 같은 응력이 존재하는 것도 맞습니다(인간이 이해할 수 없는 개념같기도 합니다). σij를 i를 법선으로 하는 평면에서 j방향으로의 응력이라고 놓으면 아래와 같은 행렬로 표현할 수 있습니다.
σij=[σxxσxyσxzσyxσyyσyzσzxσzyσzz]
이번에는 위치에 따른 응력의 변화를 고려해보겠습니다. 응력을 x,y에 대한 함수로 생각하면 점의 이동에 따른 응력의 변화를 아래 그림과 같이 표현할 수 있습니다. Fx와 Fy 는 bodyfore 입니다.
그림 2은 요소의 극한값으로 ‘점’이 었다면, 그림3는 점이 아니라 변의 길이를 갖는 어떤 요소입니다. 우리는 힘의 평형 조건을 가정했으므로, 위 그림에서 두가지 평형방정식을 세울 수 있습니다. 모멘트 평형과 힘 평형입니다.
그림 3에서 모멘트 평형을 이용하면 아래 식을 도출할 수 있습니다.
τxy=τyx
그림 3에서 힘의 평형식을 이용하면 아래 식을 도출할 수 있습니다.
∂σx∂x+∂τyx∂y+Fx=0
∂σy∂y+∂τxy∂x+Fy=0
요소를 다르게 잘라보면 응력은 어떻게 될까요. 정육면체가 아니라 아래 그림과 같이 사면체로 잘라보는 것입니다. 이 경우도 한 점에 작용하는 응력입니다.
빗면의 normal 방향벡터를 →n이라고 놓겠습니다. 빗면에 작용하는 응력벡터를 →p 라고 놓겠습니다. normal과 shear 가 아닌 응력의 합력입니다. 아래와 같이 normal 과 shear 성분으로 분해할 수 있습니다.
→p=σ→n+τ→s
또는 아래와 같이 좌표계를 이용하여 분해할 수도 있습니다.
→p=px→i+py→j+pz→k
이제 px,py,pz를 기존 응력 요소들과 연관지어봅시다. 기존 응력요소(그림2)들을 알고 있다고 가정하고 px,py,pz 를 구하려는 것입니다. 이때도 힘의 평형방정식이 사용됩니다. 그 전에 아래와 같은 방향코사인을 정의하겠습니다.
cosα=l
cosβ=m
cosγ=n
단위벡터 →n의 x,y,z 성분을 각도로 나타낸 것입니다. 따라서 아래 벡터는 빗변의 normal 방향의 단위벡터입니다.
l→i+m→j+n→k
힘의 평형방정식을 세우기 위해서 응력에 면적을 곱해줘야 합니다(면적이 있는 점이라니 이해가 잘 안됩니다). 평형방정식은 아래와 같습니다.
∑Fx=pxA−σxAQAB−τyxAQAC−τzxAQBC=0
∑Fy=pyA−τxyAQAB−σyAQAC−τzyAQBC=0
∑Fz=pzA−τzyAQAB−τyzAQAC−σzAQBC=0
평형방정식을 정리하면 아래와 같습니다.
px=σxl+τxym+τxznpy=τxyl+σym+τyznpz=τxzl+τyzm+σzn
행렬형태 식으로 나타내면 아래와 같습니다.
[pxpypz]=[σxτxyτxzτyxσyτyzτzxτzyσz][lmn]
뭘 한건지 중간정리해봅시다. 사면체의 빗면에서의 응력을 구한 것입니다. 사면체 빗면의 단위방향벡터를 →n이라고 놓는다면 사면체 빗면의 응력 벡터의 성분은 아래와 같이 구합니다.
px=σxl+τxym+τxznpy=τxyl+σym+τyznpz=τxzl+τyzm+σzn
이때 응력 벡터는 아래와 같습니다.
→p=px→i+py→j+pz→k
이 벡터를 n방향과 s(shear) 방향으로 분해해봅시다. 아래와 같이 분해할 것입니다.
→p=σ→n+τ→s
σ는 아래와 같이 구할 수 있습니다. 응력벡터를 n방향으로 투영한 크기입니다.
σ=→p⋅→n
n방향 응력벡터를 구했으니 아래 식을 통해 shear 방향 응력벡터도 구할 수 있습니다.
τ→s=→p−σ→n
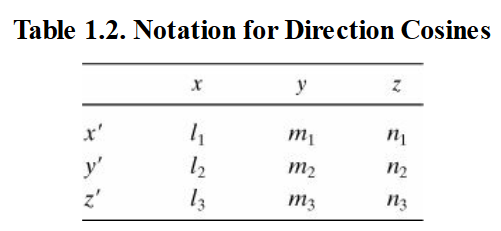
이번에는 빗면에 특정 좌표계를 잡고 해당 좌표계에서 응력 성분을 분해해봅시다. x’,y’,z’ 라는 새로운 좌표계입니다. x’ 축이 빗면의 법선벡터 방향과 일치하는 좌표계입니다. 기존 좌표계 x,y,z 와 새로운 좌표계 x’,y’,z’ 사이의 방향코사인 관계는 아래와 같습니다.
σx′=pxl1+pym1+pzn1
τx′y′=pxl2+pym2+pzn2
τx′z′=pxl3+pym3+pzn3
위 식에 아래 식을 대입하면 x,y,z 응력 요소를 이용하여 x’,y’,z’ 응력요소를 구할 수 있습니다.
px=σxl1+τxym1+τxzn1py=τxyl1+σym1+τyzn1pz=τxzl1+τyzm1+σzn1
대입 결과는 아래와 같습니다.
σx′=σxl21+σym21+σzn21+2(τxyl1m1+τyzm1n1+τxzl1n1)
τx′y′=σxl1l2+σym1m2+σzn1n2+τxy(l1m2+m1l2)+τyz(m1n2+n1m2)+τxz(n1l2+l1n2)
τx′z′=σxl1l3+σym1m3+σzn1n3+τxy(l1m3+m1l3)+τyz(m1n3+n1m3)+τxz(n1l3+l1n3)
이 빗면을 중심으로 새로운 정육면체 요소를 만들어 볼 수 있습니다. 이번에는 n 방향을 y’ 로 잡으면 아래 응력들이 유도됩니다.
σy′=pxl2+pym2+pzn2
τy′x′=pxl1+pym1+pzn1
τy′z′=pxl3+pym3+pzn3
이때 p 벡터가 x’를 n방향으로 잡을 때와 달라집니다. y’ 을 법선으로 하는 빗변에서 새로 구해야합니다. 아래와 같습니다.
px=σxl2+τxym2+τxzn2py=τxyl2+σym2+τyzn2pz=τxzl2+τyzm2+σzn2
비슷한 방법으로 σz 와 σzx도 구할 수 있습니다.
방금 우리는 x,y,z 라는 좌표계에서 알고 있는 응력을 x’,y’,z’ 좌표계로 transformation(변환) 한 것입니다. 물체 내의 한 점에서의 응력요소는 좌표계에 따라 값이 달라진다는 것을 알 수 있습니다.
좌표계를 적당히 잘 바꾸면 normal stress 가 최대가 되는 좌표계를 찾을 수 있을 것입니다. 아래 식을 봅시다.
σx′=pxl1+pym1+pzn1
응력이 최대가 되는 조건을 생각해봅시다. 우리가 통제할 수 있는 변수는 l1,m1, n1 입니다. 셋의 제곱합이 1이므로, 셋중 둘만 독립변수입니다. l1,m1 으로 위 식을 편미분하여 0이 될 때 극값이 발생합니다.
∂σx′∂l1=px+pz∂n1∂l1=0 (1)
∂σx′∂m1=py+pz∂n1∂m1=0 (2)
또한 아래 식이 성립합니다.
n21=1−l21+m21 (3)
3번 식을 l1으로 미분합니다.
∂n1∂l1⋅(2n1)=−2l1
아래와 같이 변형합니다.
∂n1∂l1=−l1n1 (4)
3번 식을 m1으로 미분합니다.
∂n1∂m1⋅(2n1)=−2m1
아래와 같이 변형합니다.
∂n1∂l1=−m1n1 (5)
(4)를 (1)번 식에 대입합니다.
px+pz(−l1n1)=0
아래와 같이 변형합니다.
pxl1=pzn1
(5)를 (2)식에 대입합니다.
py+pz(−m1n1)=0
아래와 같이 변형합니다.
pym1=pzn1
따라서 아래 식이 유도됩니다.
pxl1=pym1=pzn1
위 식이 만족한다는 것은 응력벡터 p의 방향과 절단면의 법선벡터 n의 방향이 같다는 의미입니다. 이해를 돕기 위해 아래와 같이 변형합시다.
pxl1=pym1=pzn1=k
아래와 같이 변형할 수 있습니다.
px=kl1
py=km1
pz=kn1
아래와 같이 벡터 형태로 변형할 수 있습니다.
(px,py,pz)=k(l1,m1,n1)
한 벡터가 다른 벡터의 상수배이므로 두 벡터는 평행합니다.
정리해봅시다. 우리는 응력이 최대가 되는 절단면을 찾고 있습니다. 응력이 최대가 되는 절단면은 단면의 법선 방향과 응력벡터 p의 방향이 같은 절단면입니다. 따라서 이때의 응력은 전단응력은 없고 수직응력만 있습니다. 이 응력을 주응력(principal stress)라고 부릅니다. 이 응력을 σp라고 놓겠습니다. 이때 아래 등식이 성립합니다.
px=σpl1
py=σpm1
pz=σpn1
기존 좌표계의 응력과의 관계식은 아래와 같았습니다.
px=σxl1+τxym1+τxzn1py=τxyl1+σym1+τyzn1pz=τxzl1+τyzm1+σzn1
따라서 아래 식을 얻을 수 있습니다.
σxl1+τxym1+τxzn1=σpl1τxyl1+σym1+τyzn1=σpm1τxzl1+τyzm1+σzn1=σpn1
이항하여 정리하면 아래와 같습니다.
(σx−σp)l1+τxym1+τxzn1=0τxyl1+(σy−σp)m1+τyzn1=0τxzl1+τyzm1+(σz−σp)n1=0
행렬의 곱셈 형태로 표현하면 아래와 같습니다.
[σx−σpτxyτxzτxyσy−σpτyzτxzτyzσz−σp][l1m1n1]
0이 아닌 해가 존재하려면 행렬식이 0이어야 합니다.
|σx−σpτxyτxzτxyσy−σpτyzτxzτyzσz−σp|=0
계산하면 아래와 같습니다.
σ3p+I1σ2p+I2σ2p−I3=0
I1=σx+σy+σz
I2=σxσy+σxσz+σyσz−τ2xy−τ2yz−τ2xz
I3=|σxτxyτxzτxyσyτyzτxzτyzσz|
I는 불변량입니다. 어떤 좌표계에서 구해도 같은 값을 얻습니다. 그래야 principal stress가 항상 같겠죠.
위 3차 방정식을 풀면 σp가 세개 나옵니다. 주응력 각각 마다 (l,m,n)이 나옵니다. 주응력과 그 방향을 구한 것입니다.
'기계공학 기타과목 > 탄성학 강의' 카테고리의 다른 글
| [탄성학] 1. 탄성학의 목적 (0) | 2024.03.17 |
|---|
댓글